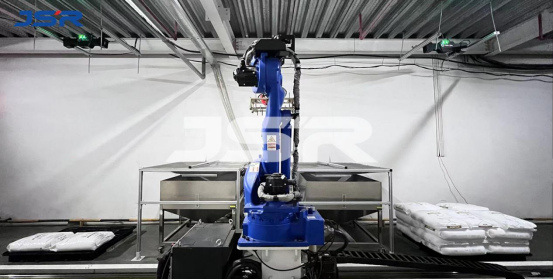
JSR'ロボットハンドリングプロセス自動化 安川 ハンドリングロボットはプラスチック粒子袋のハンドリングと開梱に使用されます。 それは正確で信頼性が高く持続可能なハンドリング操作により、生産自動化を促進する価値に貢献します。.
機械、農業、衣料、建築、日常生活など、あらゆる場面でリサイクルプラスチック粒子の姿が見られます。包装後、これらの粒子は手作業で処理する必要があり、これは高コストで労働集約性の高い断続的な作業です。お客様の以前の作業時間は8時間で、1袋の材料は25kgでした。手作業の効率は1分間に2袋、1日に960袋を分解できます。ロボットによる処理と分解後の作業時間は24時間で、連続運転が可能で、効率は1分間に3袋、1日に4320袋を分解できます。
Jieshが実施したソリューションお客様向けeng:安川ハンドリングロボットGP180、7.5mの地上レール、材料ビン、材料ラック、GP180の最大荷重180kg、最大アームスパン2702mm。7.5mの地球軌道の有効移動距離は6m、移動速度は0.7m/sです。3D視覚識別ブランキングシステム。3D視覚識別ブランキングシステム、学習機能付きカメラ、初期の材料データ取得と後の材料モデリングにより、カメラ認識の成功率は99.9%です。
自動生産により作業効率が大幅に向上し、生産能力が安定し、納品が正確で、安全性が高く、既存エリアを合理的に活用でき、企業イメージと工場の清潔さが向上し、無人生産が実現します。
投稿日時: 2022年9月26日
