YRC1000でPROFIBUSボードAB3601(HMS社製)を使用する場合、どのような設定が必要ですか?
このボードを使用することで、YRC1000 の汎用 IO データを他の PROFIBUS 通信ステーションと交換することができます。
システム構成
AB3601 ボードを使用する場合、AB3601 ボードはスレーブ ステーションとしてのみ使用できます。
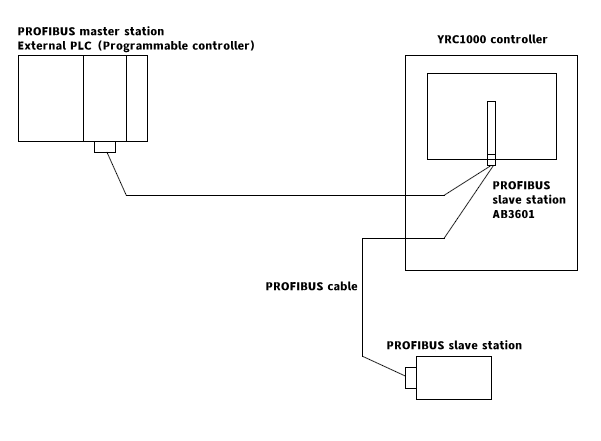
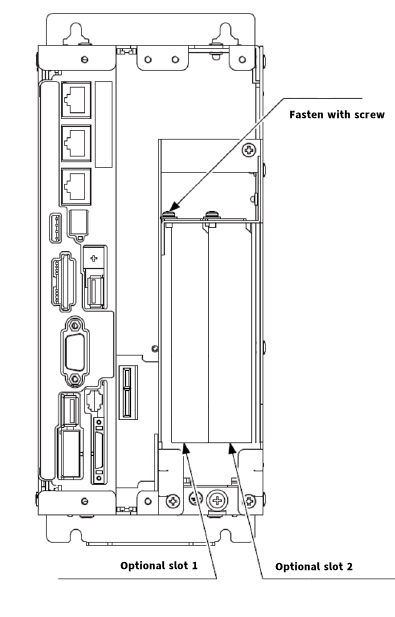
ボードの取り付け位置: YRC1000制御盤内のPCIスロット
最大入出力点数:入力164バイト、出力164バイト
通信速度:9.6Kbps~12Mbps
取締役会の割り当て方法
AB3601をYRC1000で使用するには、以下の手順に従ってオプションボードとI/Oモジュールを設定する必要があります。
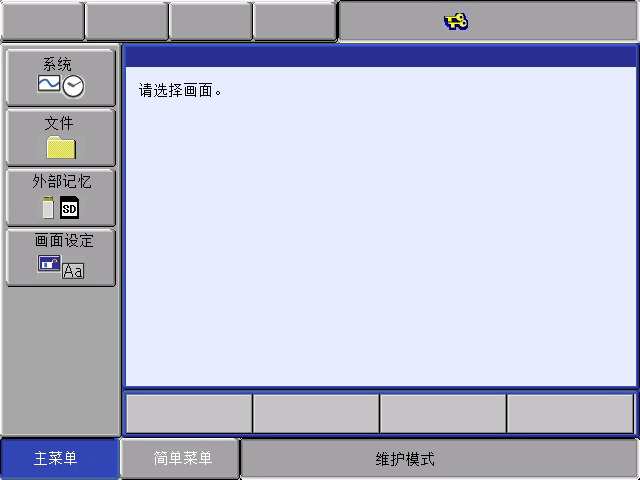
1.「メインメニュー」を押しながら再度電源を入れます。 – メンテナンスモードが開始されます。
2. セキュリティ モードを管理モードまたはセキュリティ モードに変更します。
3. メインメニューから「システム」を選択します。 – サブメニューが表示されます。

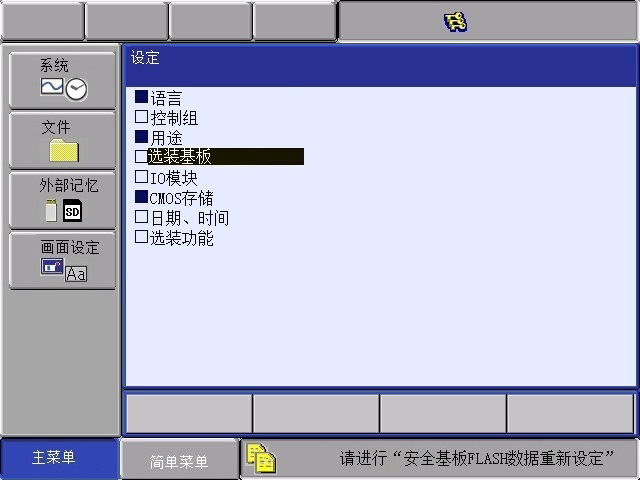
4.「設定」を選択します。 – 設定画面が表示されます。
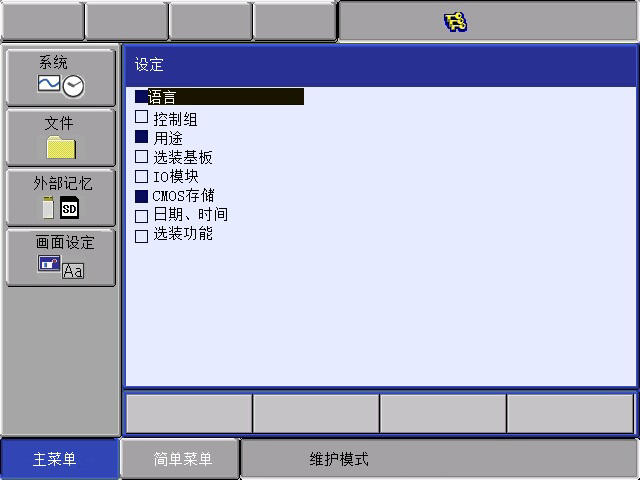
5.「オプションボード」を選択します。 – オプションボード画面が表示されます。

6. AB3601を選択します。 – AB3601の設定画面が表示されます。

① AB3601:「使用する」に設定してください。
②IO容量:送信IO容量を1~164の間で設定してください。この記事では16に設定しています。
③ノードアドレス:0~125の範囲で設定し、この記事では0に設定します。
④ ボーレート:自動で判断するので別途設定する必要はありません。
7.「Enter」を押します。 – 確認ダイアログボックスが表示されます。

8.「はい」を選択します。 – I/Oモジュール画面が表示されます。
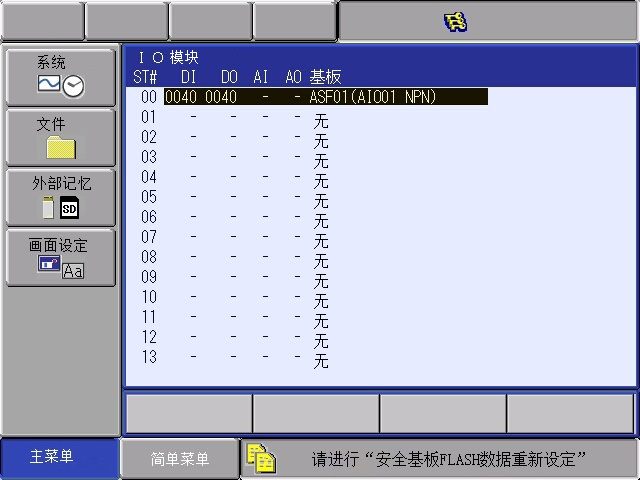
9.「Enter」と「はい」を続けて押してI/Oモジュール画面を表示し、AB3601のIO割り当て結果を表示し、外部入出力設定画面が表示されるまで続けます。
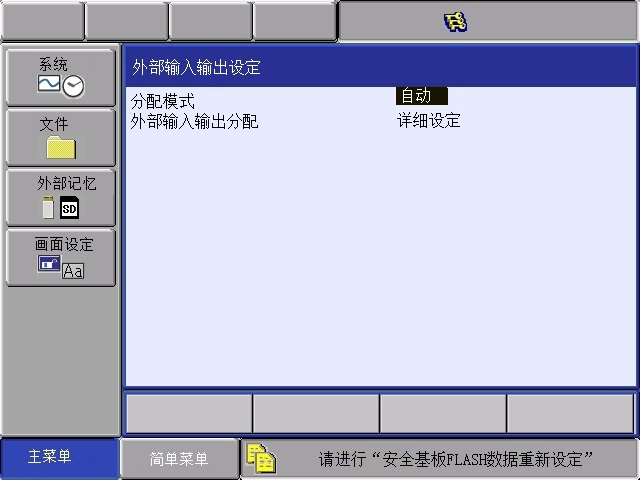
割り当てモードは通常、自動を選択します。特別なニーズがある場合は、手動に変更し、対応するIO開始位置ポイントを手動で割り当てることができます。この位置は重複しません。
10.「Enter」を押し続けると、入力と出力の自動割り当て関係が表示されます。
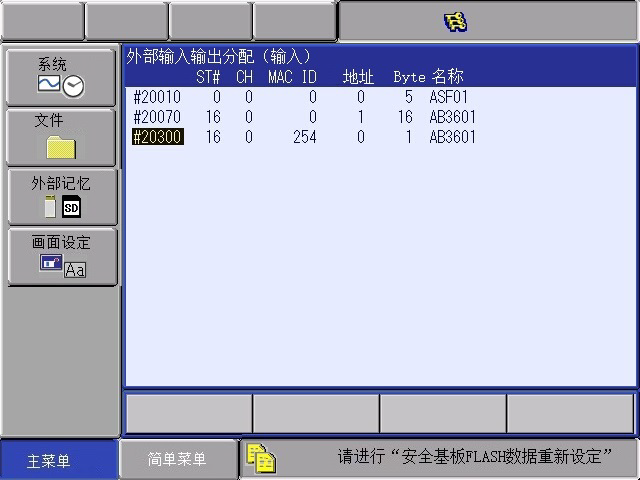

11. 次に「はい」を押して確認し、初期設定画面に戻ります。
12. システムモードをセーフモードに変更します。手順2でセーフモードに変更した場合は、そのまま使用できます。
13. メインメニューの左端にある「ファイル」-「初期化」を選択すると、初期化画面が表示されます。
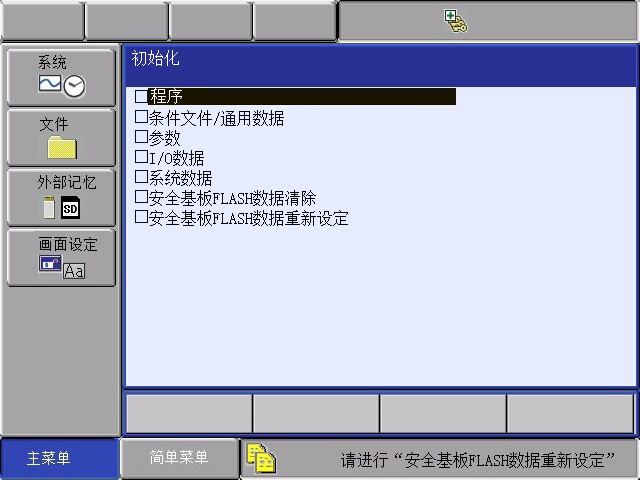
14.安全基板のFLASHデータリセットを選択します。確認ダイアログボックスが表示されます。
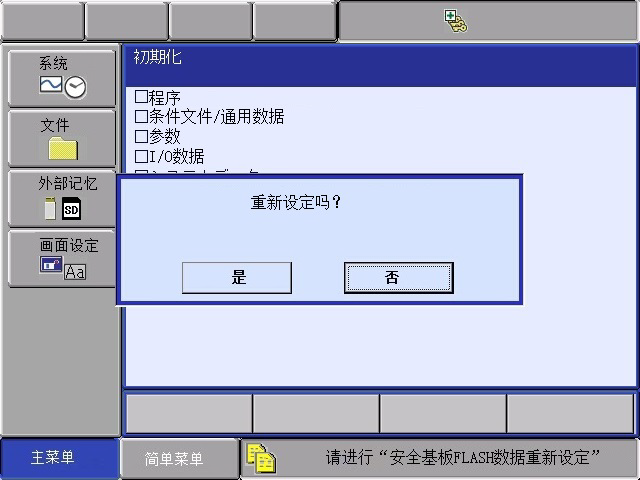
15. 「はい」を選択します。「ピー」という音が鳴ったら、ロボット側の設定操作は完了です。シャットダウン後、通常モードで再起動できます。
投稿日時: 2025年3月5日
